植物提取物的研發 從傳統智慧到現代創新

植物提取物是從植物中通過物理或化學方法提取出的活性成分集合,廣泛應用于醫藥、食品、化妝品和農業等領域。植物提取物的研發結合了傳統草藥知識與現代科學技術,旨在高效、安全地利用植物的生物活性成分。
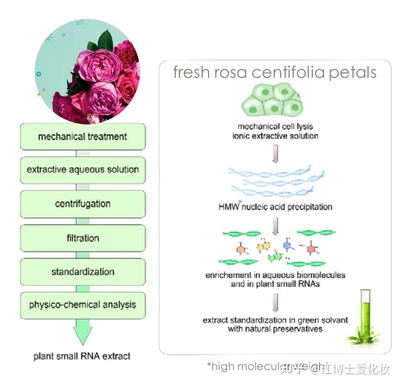
植物提取物研發的關鍵步驟包括:
- 原料選擇與鑒定:選擇優質植物原料,并通過形態學、化學或分子生物學方法準確鑒定物種,確保來源可靠。
- 提取工藝優化:采用水提、醇提、超臨界流體萃取等方法,優化溫度、時間和溶劑參數,以提高提取率和活性成分純度。
- 成分分析與標準化:利用色譜、質譜等技術分析提取物成分,建立質量標準,確保批次一致性和功效穩定性。
- 生物活性評價:通過體外和體內實驗評估提取物的抗氧化、抗炎、抗菌等生物活性,驗證其應用潛力。
- 安全性與法規合規:進行毒理學測試,確保提取物安全性,并遵循相關法規(如FDA、EMA標準)推動產品市場化。
研發挑戰包括植物資源可持續性、成分復雜性和標準化難度。未來,隨著基因組學、合成生物學和人工智能的應用,植物提取物研發將更精準、高效,為健康產業提供創新解決方案。
如若轉載,請注明出處:http://m.top22.cn/product/18.html
更新時間:2026-06-19 04:04:32